ઝડપી પોસ્ટ માટે અમારા સોશિયલ મીડિયા પર સબ્સ્ક્રાઇબ કરો
ટેકનોલોજીકલ પ્રગતિના યુગમાં, નેવિગેશન સિસ્ટમ્સ પાયાના સ્તંભો તરીકે ઉભરી આવી, જેમાં અસંખ્ય પ્રગતિઓ થઈ, ખાસ કરીને ચોકસાઇ-નિર્ણાયક ક્ષેત્રોમાં. પ્રાથમિક અવકાશી નેવિગેશનથી અત્યાધુનિક ઇનર્શિયલ નેવિગેશન સિસ્ટમ્સ (INS) સુધીની સફર માનવજાતના સંશોધન અને ચોક્કસ ચોકસાઈ માટેના અથાક પ્રયાસોનું પ્રતીક છે. આ વિશ્લેષણ INS ના જટિલ મિકેનિક્સમાં ઊંડાણપૂર્વક ઊંડાણપૂર્વક ઊંડાણપૂર્વક અભ્યાસ કરે છે, જેમાં ફાઇબર ઓપ્ટિક ગાયરોસ્કોપ (FOGs) ની અત્યાધુનિક ટેકનોલોજી અને ફાઇબર લૂપ્સ જાળવવામાં ધ્રુવીકરણની મુખ્ય ભૂમિકાની શોધ કરવામાં આવે છે.
ભાગ ૧: ઇનર્શિયલ નેવિગેશન સિસ્ટમ્સ (INS) ને સમજવાનું:
ઇનર્શિયલ નેવિગેશન સિસ્ટમ્સ (INS) એ સ્વાયત્ત નેવિગેશનલ સહાયક તરીકે અલગ પડે છે, જે બાહ્ય સંકેતોથી સ્વતંત્ર રીતે વાહનની સ્થિતિ, દિશા અને વેગની ચોક્કસ ગણતરી કરે છે. આ સિસ્ટમો ગતિ અને પરિભ્રમણ સેન્સરને સુમેળ બનાવે છે, પ્રારંભિક વેગ, સ્થિતિ અને દિશા માટે ગણતરીત્મક મોડેલો સાથે એકીકૃત રીતે સંકલિત થાય છે.
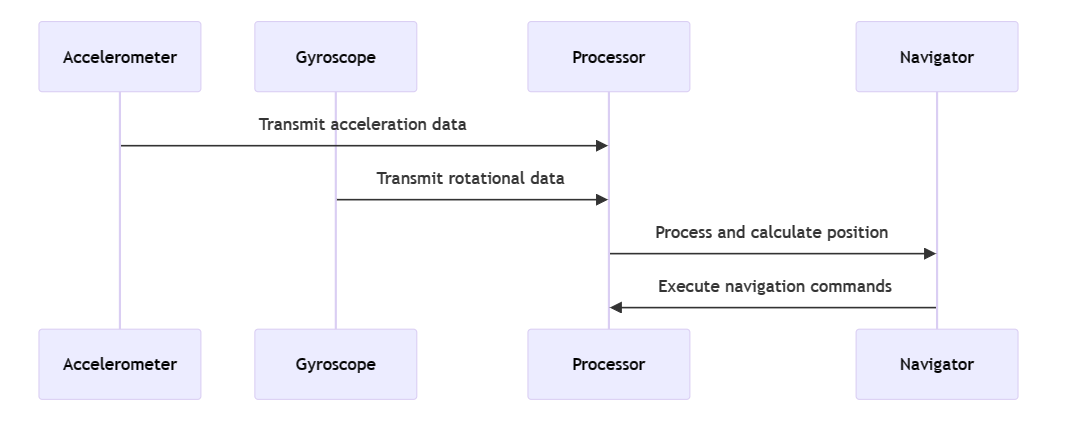
એક આર્કેટિપલ INS ત્રણ મુખ્ય ઘટકોનો સમાવેશ કરે છે:
· એક્સીલેરોમીટર: આ મહત્વપૂર્ણ તત્વો વાહનના રેખીય પ્રવેગને નોંધે છે, ગતિને માપી શકાય તેવા ડેટામાં રૂપાંતરિત કરે છે.
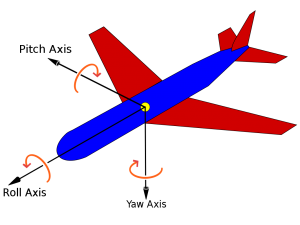
· ગાયરોસ્કોપ: કોણીય વેગ નક્કી કરવા માટે અભિન્ન, આ ઘટકો સિસ્ટમ ઓરિએન્ટેશન માટે મહત્વપૂર્ણ છે.
· કોમ્પ્યુટર મોડ્યુલ: INS નું જ્ઞાનતંતુ કેન્દ્ર, રીઅલ-ટાઇમ પોઝિશનલ એનાલિટિક્સ મેળવવા માટે બહુપક્ષીય ડેટા પર પ્રક્રિયા કરે છે.
બાહ્ય અવરોધો સામે INS ની રોગપ્રતિકારક શક્તિ તેને સંરક્ષણ ક્ષેત્રોમાં અનિવાર્ય બનાવે છે. જોકે, તે 'ડ્રિફ્ટ' - ધીમે ધીમે ચોકસાઈના ક્ષય - સાથે ઝઝૂમી રહ્યું છે, જેના કારણે ભૂલ ઘટાડવા માટે સેન્સર ફ્યુઝન જેવા અત્યાધુનિક ઉકેલોની જરૂર પડે છે (ચેટફિલ્ડ, 1997).
ભાગ 2. ફાઇબર ઓપ્ટિક ગાયરોસ્કોપની ઓપરેશનલ ડાયનેમિક્સ:
ફાઇબર ઓપ્ટિક ગાયરોસ્કોપ (FOGs) પ્રકાશના હસ્તક્ષેપનો ઉપયોગ કરીને રોટેશનલ સેન્સિંગમાં પરિવર્તનશીલ યુગની શરૂઆત કરે છે. તેના મૂળમાં ચોકસાઇ સાથે, FOGs એરોસ્પેસ વાહનોના સ્થિરીકરણ અને નેવિગેશન માટે મહત્વપૂર્ણ છે.
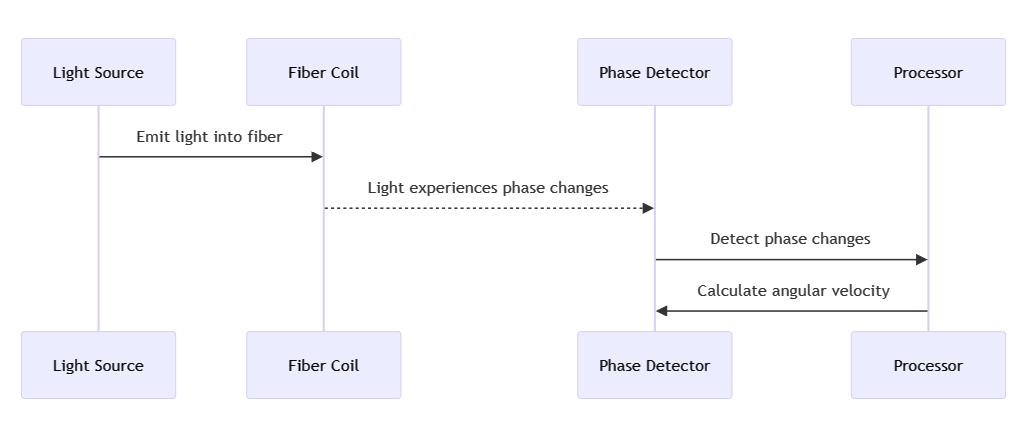
FOGs સેગ્નેક અસર પર કાર્ય કરે છે, જ્યાં પ્રકાશ, ફરતા ફાઇબર કોઇલમાં વિરુદ્ધ દિશામાં પસાર થતો, પરિભ્રમણ દર ફેરફારો સાથે સંકળાયેલ તબક્કા શિફ્ટ દર્શાવે છે. આ સૂક્ષ્મ પદ્ધતિ ચોક્કસ કોણીય વેગ મેટ્રિક્સમાં અનુવાદ કરે છે.
આવશ્યક ઘટકોમાં શામેલ છે:
· પ્રકાશ સ્ત્રોત: શરૂઆત બિંદુ, સામાન્ય રીતે લેસર, સુસંગત પ્રકાશ યાત્રા શરૂ કરે છે.
· ફાઇબર કોઇલ: એક ગૂંચળુંવાળું ઓપ્ટિકલ નળી, પ્રકાશના માર્ગને લંબાવે છે, જેનાથી સેગ્નેક અસરમાં વધારો થાય છે.
· ફોટોડિટેક્ટર: આ ઘટક પ્રકાશના જટિલ હસ્તક્ષેપ પેટર્નને પારખે છે.
ભાગ ૩: ફાઇબર લૂપ્સ જાળવવા માટે ધ્રુવીકરણનું મહત્વ:
ધ્રુવીકરણ જાળવણી (PM) ફાઇબર લૂપ્સ, FOGs માટે સર્વગ્રાહી, પ્રકાશની એકસમાન ધ્રુવીકરણ સ્થિતિની ખાતરી કરે છે, જે હસ્તક્ષેપ પેટર્ન ચોકસાઇમાં મુખ્ય નિર્ણાયક છે. આ વિશિષ્ટ તંતુઓ, ધ્રુવીકરણ સ્થિતિના વિક્ષેપનો સામનો કરીને, FOG સંવેદનશીલતા અને ડેટા પ્રામાણિકતાને મજબૂત બનાવે છે (કેર્સી, 1996).
પીએમ ફાઇબરની પસંદગી, કાર્યકારી આવશ્યકતાઓ, ભૌતિક ગુણધર્મો અને પ્રણાલીગત સંવાદિતા દ્વારા નક્કી થાય છે, જે વ્યાપક કામગીરી માપદંડોને પ્રભાવિત કરે છે.
ભાગ ૪: એપ્લિકેશનો અને પ્રયોગમૂલક પુરાવા:
FOGs અને INS વિવિધ એપ્લિકેશનોમાં પડઘો પાડે છે, જેમાં માનવરહિત હવાઈ હુમલાઓનું આયોજન કરવાથી લઈને પર્યાવરણીય અનિશ્ચિતતા વચ્ચે સિનેમેટિક સ્થિરતા સુનિશ્ચિત કરવા સુધીનો સમાવેશ થાય છે. તેમની વિશ્વસનીયતાનો પુરાવો નાસાના માર્સ રોવર્સમાં તેમની જમાવટ છે, જે નિષ્ફળ-સલામત બહારની દુનિયાના નેવિગેશનને સરળ બનાવે છે (મૈમોન, ચેંગ અને મેથીઝ, 2007).
બજારના માર્ગો આ તકનીકો માટે વધતી જતી વિશિષ્ટતાની આગાહી કરે છે, જેમાં સંશોધન વેક્ટરનો હેતુ સિસ્ટમ સ્થિતિસ્થાપકતા, ચોકસાઇ મેટ્રિસિસ અને અનુકૂલનક્ષમતા સ્પેક્ટ્રાને મજબૂત બનાવવાનો છે (માર્કેટસેન્ડમાર્કેટ્સ, 2020).

રીંગ લેસર ગાયરોસ્કોપ
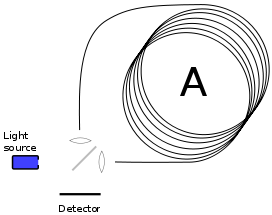
સેગ્નેક અસર પર આધારિત ફાઇબર-ઓપ્ટિક-ગાયરોસ્કોપનું આકૃતિત્મક
સંદર્ભ:
- ચેટફિલ્ડ, એબી, 1997.ઉચ્ચ ચોકસાઈ ઇનર્શિયલ નેવિગેશનના મૂળભૂત સિદ્ધાંતો.અવકાશયાત્રી અને એરોનોટિક્સ માં પ્રગતિ, ભાગ ૧૭૪. રેસ્ટન, VA: અમેરિકન ઇન્સ્ટિટ્યૂટ ઓફ એરોનોટિક્સ અને એસ્ટ્રોનોટિક્સ.
- કેર્સી, એડી, એટ અલ., 1996. "ફાઇબર ઓપ્ટિક ગાયરોસ: ટેકનોલોજી પ્રગતિના 20 વર્ષ," માંIEEE ની કાર્યવાહી,84(12), પૃષ્ઠ 1830-1834.
- મેમોન, એમડબ્લ્યુ, ચેંગ, વાય., અને મેથીસ, એલ., 2007. "મંગળ સંશોધન રોવર્સ પર વિઝ્યુઅલ ઓડોમેટ્રી - સચોટ ડ્રાઇવિંગ અને વિજ્ઞાન છબી સુનિશ્ચિત કરવા માટેનું એક સાધન,"IEEE રોબોટિક્સ અને ઓટોમેશન મેગેઝિન,૧૪(૨), પૃષ્ઠ ૫૪-૬૨.
- માર્કેટ્સએન્ડમાર્કેટ્સ, 2020. "ગ્રેડ, ટેકનોલોજી, એપ્લિકેશન, ઘટક અને પ્રદેશ દ્વારા ઇનર્શિયલ નેવિગેશન સિસ્ટમ માર્કેટ - 2025 સુધી વૈશ્વિક આગાહી."
અસ્વીકરણ:
- અમે અહીં જાહેર કરીએ છીએ કે અમારી વેબસાઇટ પર પ્રદર્શિત કેટલીક છબીઓ ઇન્ટરનેટ અને વિકિપીડિયા પરથી શિક્ષણને આગળ વધારવા અને માહિતી શેર કરવાના હેતુથી એકત્રિત કરવામાં આવી છે. અમે બધા મૂળ સર્જકોના બૌદ્ધિક સંપદા અધિકારોનો આદર કરીએ છીએ. આ છબીઓનો ઉપયોગ વ્યાપારી લાભના કોઈ હેતુથી કરવામાં આવતો નથી.
- જો તમને લાગે કે ઉપયોગમાં લેવાયેલી કોઈપણ સામગ્રી તમારા કૉપિરાઇટનું ઉલ્લંઘન કરે છે, તો કૃપા કરીને અમારો સંપર્ક કરો. બૌદ્ધિક સંપદા કાયદા અને નિયમોનું પાલન સુનિશ્ચિત કરવા માટે અમે યોગ્ય પગલાં લેવા તૈયાર છીએ, જેમાં છબીઓ દૂર કરવી અથવા યોગ્ય એટ્રિબ્યુશન પૂરું પાડવું શામેલ છે. અમારો ઉદ્દેશ્ય એક એવું પ્લેટફોર્મ જાળવવાનો છે જે સામગ્રીથી સમૃદ્ધ, ન્યાયી અને અન્ય લોકોના બૌદ્ધિક સંપદા અધિકારોનો આદર કરે.
- કૃપા કરીને નીચેની સંપર્ક પદ્ધતિ દ્વારા અમારો સંપર્ક કરો,email: sales@lumispot.cn. અમે કોઈપણ સૂચના પ્રાપ્ત થતાંની સાથે તાત્કાલિક પગલાં લેવા અને આવી કોઈપણ સમસ્યાઓના ઉકેલમાં 100% સહયોગ સુનિશ્ચિત કરવા પ્રતિબદ્ધ છીએ.
પોસ્ટ સમય: ઓક્ટોબર-૧૮-૨૦૨૩